- Мобильная робототехника;
- Программирование и управление робототехническими системами;
- Основы информационных технологий;
- Основы систем навигации.
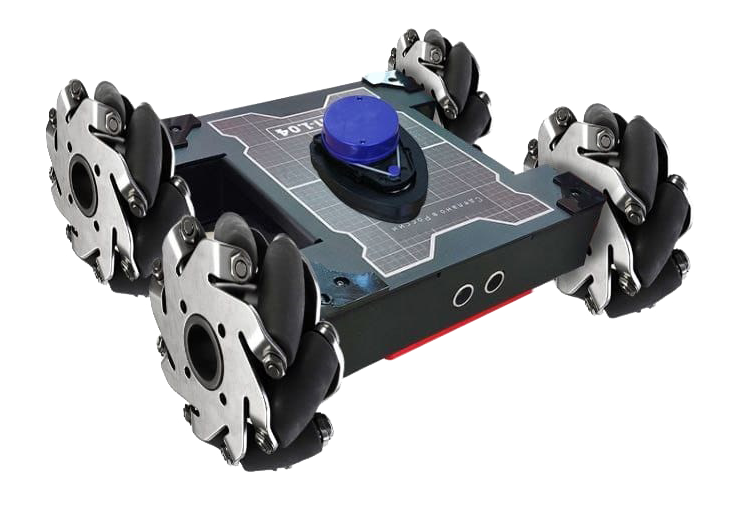
Мобильный робот с колесами всенаправленного движения Optima - drive - 2 выполнен на базе Arduino – совместимого контроллера, оснащен лидаром, гироскопом, акселерометром, магнитным компасом, ультразвуковыми датчиками и датчиками линии позволяющими выполнять автономное выполнение широкого спектра задач по перемещению платформы и ориентированию в пространстве.